| 概要 |
| MER520运动控制器是针对激光行业,将振镜控制、激光控制、运动控制结合起来的一款激光振镜运动控制器。支持脉冲轴/总线轴/振镜轴混合插补,无需额外的硬件就可以实现振镜打标和轨迹切割的功能。支持最多达20 轴ECAT/RTEX 总线连接,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、 同步跟随、虚拟轴设置、机械手控制等;采用优化的网络通讯协议可以实现实时的运动控制。广泛应用于金属非金属的打标、切割、加工、快速成型等应用领域。 |
| 特征 |
振镜轴输出模式:XY2-100 协议,刷新周期50us
支持MOVE_OP精准输出,可设置提前、延时开关激光输出
支持多达12路PWM输出,可设置PWM输出的频率和占空比,用于控制激光能量输出
支持多达 20 轴运动控制(4 脉冲轴+EtherCAT 轴/RTEX 轴/编码器轴/振镜轴/虚拟轴)
支持硬件比较输出(HW_PSWITCH2),硬件定时器,运动中精准输出
脉冲轴输出模式:方向/脉冲或双脉冲。
支持编码器位置测量,可以配置为手轮输入模式
每轴最大输出脉冲频率 10MHz
通过 EtherCAT 总线,最多可扩展到 4096 个隔离输入或输出口
轴正负限位信号口/原点信号口可以随意配置为任何输入口
输出口最大输出电流可达 300mA,另带 2 个 500mA 大电流输出口,可直接驱动部分电磁阀
U 盘接口、RS485 接口、以太网接口
支持最多达 16 轴直线插补、任意空间圆弧插补、螺旋插补、样条插补
支持脉冲轴/总线轴/振镜轴混合插补
支持电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能
支持脉冲闭环,螺距补偿等功能
支持多文件多任务编程
多种程序加密手段,保护客户的知识产权
掉电检测,掉电存储 |
| 技术概述 |
| 参数/规格 |
MER520 |
| 基本轴数 |
20 |
| 最多扩展轴数 |
20 |
| 基本轴类型 |
EtherCAT/RTEX/4 差分脉冲轴(另输出口可配置 6 个单端脉冲轴)/ 4 振镜轴。 |
| 内部 IO 数 |
24 进 12 出(带过流保护), 另外每差分脉冲轴有 1 进 1 出. |
| 最多扩展 IO 数 |
4096 进 4096 出 |
| PWM 数 |
12(输出频率 1M) |
| 内部 ADDA 数 |
2 路 AD,2 路 DA。(0-10V) |
| 最多扩展 AD/DA |
256 路 AD,128 路 DA |
| 脉冲位数 |
64 |
| 编码器位数 |
64 |
| 速度加速度位数 |
64 |
| 脉冲最高速率 |
10Mhz |
| 每轴运动缓冲数 |
4096 |
| 数组空间 |
640000 |
| 程序空间 |
8000Kbyte |
| Flash 空间 |
256MByte |
| 电源输入 |
24V 直流输入(功耗 10W 内,不用风扇散热), IO 口负载没有计算在内。 |
| 通讯接口 |
RS232,RS485,以太网,U 盘,CAN, RTEX,EtherCAT |
| 外形尺寸 |
216*144mm |
|
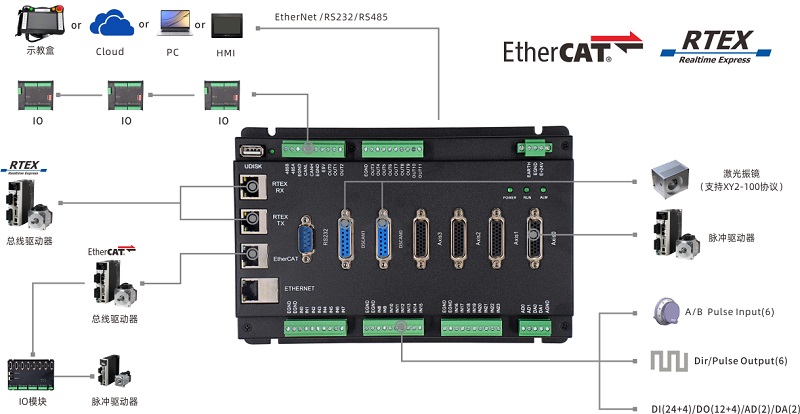
| 系统架构 |
 |
| |
|
|
 |
|
 |
产品样本 |
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
|