| 概要 |
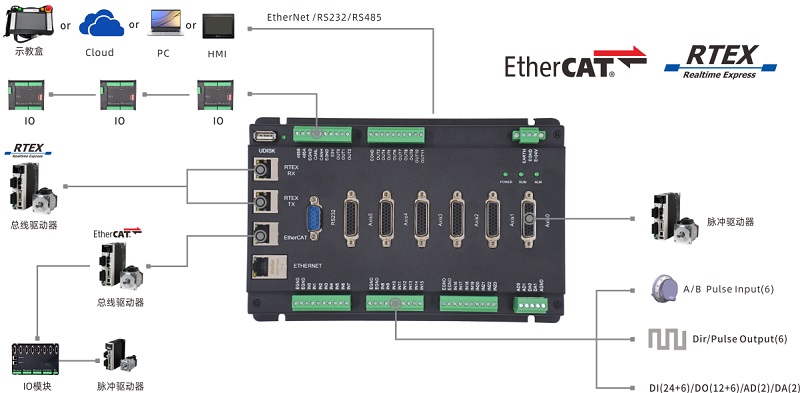
| MER560高性能多轴双总线运动控制器,最快100μs的刷新周期,同时支持EtherCAT总线和RTEX总线,支持最多达60轴,每组16轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴、机械手指令等。 |
| 特征 |
60/30个EtherCAT/RTEX数字伺服轴,支持EtherCAT/RTEX/脉冲3种类型轴混合插补
自带6个辅助脉冲轴 (脉冲输出+编码器输入)
板载24+6数字输入和12+6数字输出(12个高速PWM输出),2DA/2AD
隔离Ethernet、RS232、RS485 和 CAN接口
总线可扩展512/512/256/128 IN/OUT/AD/DA
多任务编程,22个任务,62个文件
直线插补、圆弧插补、螺旋线插补、空间圆弧、支持速度前瞻
电子齿轮、电子凸轮、运动叠加、比较输出
8个高速色标输入,1μs测量精度,支持连续锁存
各种类型机械手(Delta、SCARA、5DOF、6DOF……)
支持多任务,多轴组,多机械手协同运动 |
| 技术概述 |
| 参数/型号 |
MER560 |
| 基本轴数 |
60 |
| 最多扩展轴数 |
60 |
| 基本轴类型 |
EtherCAT/RTEX/6差分脉冲轴(另输出口可配置6个单端脉冲轴)。 |
| 内部IO数 |
24进12出(带过流保护), 另外每脉冲轴有1进1出. |
| 最多扩展IO数 |
4096进4096出 |
| PWM数 |
12(输出频率1M) |
| 内部ADDA数 |
2路AD,2路DA。(0-10V) |
| 最多扩展AD/DA |
256路AD,128路DA |
| 脉冲位数 |
64 |
| 编码器位数 |
64 |
| 速度加速度位数 |
64 |
| 脉冲最高速率 |
10Mhz |
| 每轴运动缓冲数 |
4096 |
| 数组空间 |
640000 |
| 程序空间 |
8000Kbyte |
| Flash空间 |
256MByte |
| 电源输入 |
24V直流输入(功耗10W内,不用风扇散热), IO口负载没有计算在内。 |
| 通讯接口 |
RS232,RS485,以太网,U盘,CAN, RTEX,EtherCAT |
| 外形尺寸 |
216*144mm |
|
| 系统架构 |
 |
| |
|
|
 |
|
 |
产品样本 |
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
|