| 概要 |
| SSMR系列分体式步进伺服电机驱动器,分别支持脉冲控制,SCL等控制模式,通信端口支持RS-232,全产品支持编码器反馈。 |
| 特征 |
● 闭环步进,伺服算法
● 内置智能型运动控制器
● 高效率,高精度,高响应
● 低振动,低噪音,低发热
● 加强型电机,长寿命设计 |
□全闭环
准确的位置及速度控制以满足苛刻的应用要求。
高鲁棒性的伺服控制可适应宽范围的惯性负载和摩擦负载变化。
4096脉冲/圈分辨率编码器提供了准确的位置控制,定位误差仅为±0.2°。
□低发热/高效率
根据实际负载情况实时调整电流的大小,将发热降至最低。
静止时,电流几乎为零,无发热。
接近100%力矩输出能力,在最紧凑的空间内发挥出最大的能量转化率,节能高效。
□平滑精确
基于1024线高精度编码器的空间矢量电流控制算法,在全速度范围内均有优异的性能表现,即使在低速应用时仍可保持平稳、安静的运行。
——完美解决传统步进电机低速振动噪声问题
利用高速响应的伺服控制技术升级强化了步进电机固有的刚性特质。
——在运行和静止时都确保定位的精
□高速响应
在点到点快速定位的运动场合,先进的伺服控制技术提供了大力矩输出,使得系统具有极高动态响应,大大超越了传统步进系统极限。
□大力矩
SSMR系列始终在全伺服模式下运行,电机的力矩可以被100%充分利用,系统设计时无需考虑力矩冗余。
在大多数应用场合,电机可以输出150%的额定力矩,大力矩输出在某些情况下可以简化减速机构的复杂度。
50%过载能力在短距离,高加减速的应用场合将系统优化得更加高效。 |
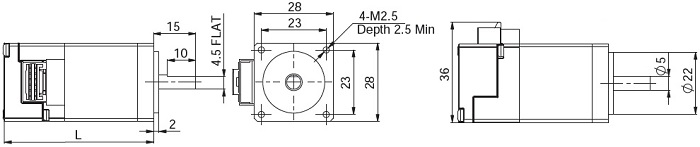
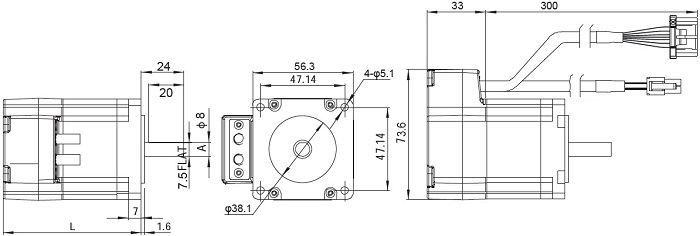
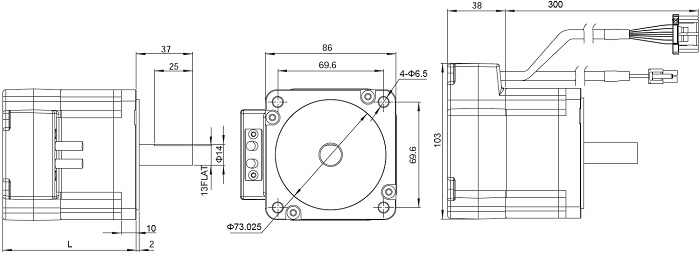
| 尺寸图 |
 |
 |
 |
 |
 |
| 技术概述 |
| 参数 |
|
SSMR11-1 |
SSMR11-2 |
SSMR11-3 |
SSMR17-1 |
SSMR17-2 |
SSMR17-3 |
SSMR17-4 |
SSMR23-2 |
SSMR23-3 |
SSMR23-4 |
SSMR24-3 |
SSMR34-1 |
SSMR34-3 |
SSMR34-5 |
| 电机法兰 |
mm |
28 |
28 |
28 |
42.3 |
42.3 |
42.3 |
42.3 |
56.3 |
56.3 |
56.3 |
60 |
86 |
86 |
86 |
| 保持转矩 |
Nm |
0.065 |
0.08 |
0.125 |
0.26 |
0.42 |
0.52 |
0.7 |
0.95 |
1.5 |
2.4 |
2.5 |
2.7 |
5.2 |
7.0 |
| 转子惯量 |
gcm^2 |
9 |
12 |
18 |
38 |
57 |
82 |
123 |
260 |
460 |
365 |
900 |
915 |
1480 |
2200 |
| 输入电源 |
VDC |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
24-70 |
编码器
分辨率 |
脉冲
/圈 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
4096 |
| 最高转速 |
rpm |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
3000 |
| 电机重量 |
g |
118 |
168 |
218 |
390 |
440 |
520 |
760 |
850 |
1250 |
1090 |
1650 |
2000 |
3100 |
4200 |
| 电机轴径 |
mm |
5 |
5 |
5 |
6 |
6 |
6 |
6 |
8 |
8 |
8 |
10 |
14 |
14 |
14 |
| 电机长度L |
mm |
44 |
53 |
64 |
60 |
65 |
74 |
89 |
78 |
100 |
103 |
110 |
88 |
118 |
147 |
|
| 曲线图 |
 |
 |
 |
 |
 |
| |
